Entanto a solução seria usar fabricas específicas para componente,mas isso aumenta ainda mais as responsabilidades da nossa classe além de agora gerar acoplamento com várias outras classes de fábrica.
Tendo a ideia é diminuir o problema do acoplamento com diversas fábricas diferentes,e de se conhecer pontos de acesso global distintos para cada dependência.
Visto que o service locator é prover um único método que recebe como argumento qual componente se deseja obter .
DI singleton é um dos design patterns com pior firma.Em 2009 durante uma entrevista em comemoração ao 15 anos do livro Design Patterns, ao ser peguntado sobre quais mudanças faria no livro em uma hipotética revisão,Erich Gamma-afirmou que tiraria Singleton dele .
O autor ainda afirmou que singletons seriam um design smell.
O eBook aborda um passo-a-passo para análise ativa de interfaces, incluindo observação de tipografia, cores, hierarquia visual e componentes. A análise do Headspace é um exemplo. A etapa de “dissecar” envolve analisar detalhes estruturais e medidas em pixels. A coleta e análise de cores visa compreender a paleta utilizada. Copiar elementos interessantes é recomendado, seguido pela criação de um repositório no Figma. A ideia é fortalecer o “músculo da criatividade” através de exercícios ativos. O Design Thinking é introduzido como um processo iterativo centrado no usuário, dividido em fases como empatizar, definir, idear, prototipar e testar. O CEO da IDEO, Tim Brown, destaca a importância da empatia e soluções inovadoras no Design Thinking. O eBook conclui com um convite para usar o “Checklist Definitivo da Criação de Interfaces” como guia prático para iniciantes.
O capítulo explora aspectos cognitivos no design de interfaces, considerando as habilidades e limitações humanas. São apresentados frameworks conceituais baseados em cognição para explicar a interação humano-computador. Os objetivos principais incluem:
Explicar a cognição e sua importância no design de interação.
Descrever aplicações da cognição no design de interação.
Oferecer exemplos de pesquisa cognitiva que contribuíram para designs interativos eficazes.
Explicar o conceito de modelos mentais.
Apresentar frameworks conceituais úteis para o design de interação.
Permitir a compreensão e elicitação de modelos mentais.
São destacado dois modos gerais de cognição: experiencial (eficaz e sem esforço) e reflexivo (pensativo e decisivo). Processos cognitivos incluem atenção, percepção, memória, aprendizado e resolução de problemas. A atenção seleciona informações relevantes, dependendo de objetivos claros e da visibilidade da informação.
O autor destaca a interdependência dos processos cognitivos, sendo a memória especialmente relevante para o design de interação. O capítulo conclui com a importância de entender como os usuários pensam e interagem para criar designs eficazes.
Resumo: O capítulo explora a cognição no design de interfaces, abordando processos cognitivos, modelos mentais e frameworks conceituais. Destaca a interdependência dos processos cognitivos e a importância de compreender como os usuários pensam para criar designs eficazes.
Após o resumo das paginas 78 e 81 chegamos a conclusão de que Várias são as questões relacionadas à manipulação direta em sistemas computacionais, com foco na interação entre usuários e interfaces. Algumas das principais ideias incluem:
Preferência pelo Teclado: Destaca-se a preferência de usuários experientes pelo uso do teclado em vez do mouse em alguns casos, devido à questão de desempenho. O teclado é considerado o dispositivo mais efetivo para diversas tarefas até aos dias de hoje.
Desafios na Escolha de Metáforas: A escolha adequada de metáforas, analogias e modelos é crucial para o design de interfaces eficientes. Problemas surgem quando as metáforas escolhidas não são apropriadas para a compreensão da comunidade de usuários, tornando-as menos explicativas.
Ambientes de Desenvolvimento: Além de implementar a manipulação direta, destaca-se a importância de criar ambientes de desenvolvimento que aumentem a produtividade dos programadores. Como exemplo incluir o uso de macros em automação de escritório e sistemas de programação visual.
Desafios na Programação de Interfaces de Usuário: Apresenta os desafios enfrentados pelos projetistas na criação de ferramentas confiáveis, como generalização computacional, acesso a estruturas de dados, facilidade de programação, simplicidade na invocação de parâmetros e baixo risco.
Dimensões Cognitivas: Introduz o framework de dimensões cognitivas proposto por Green e Petre para analisar questões relacionadas a ambientes de programação visual.
Construção de Sistemas de Manipulação Direta: Destaca a importância de criar representações ou modelos apropriados da realidade ao projetar sistemas de manipulação direta. A prática e a aplicação de conceitos de manipulação direta a partir de metáforas são enfatizadas.
Automação Residencial: Explora as oportunidades de desenvolvimento de sistemas interativos baseados em manipulação direta na automação residencial, incluindo o controle por comandos de voz e dispositivos como controles remotos universais.
Desafios na Automação Residencial: Menciona desafios específicos na automação residencial, como a complexidade de algoritmos por trás dos comandos de voz e a importância da facilidade de aprendizado para sistemas adquiridos por pessoas de alto poder aquisitivo.
Resumindo o modelo abordar a relação na manipulação direta em sistemas computacionais, desde a escolha de metáforas até os desafios na programação de interfaces e as oportunidades na automação
A importância do design em sistemas de gerenciamento espacial de dados, destacando a influência de forma positiva na escolha adequada de ícones, representações gráficas e leiautes de dados para a satisfação do usuário. Como exemplo os vídeo games, especialmente o jogo “pong”, é utilizado para ilustrar como a simplicidade e a manipulação direta contribuem para a experiência positiva do usuário.
Ainda sobre jogos é de ressalta que a competição, gráficos tridimensionais e interfaces gestuais proporcionam diversão estimulante e desafios, oferecendo lições aplicáveis a outros projetos. No entanto, são mencionadas diferenças entre ambientes de diversão e de trabalho, como a preferência por comportamento previsível em ambientes de trabalho.
O uso de sistemas de CAD (Computer Aided Design) no projeto auxiliado por computador, enfatiza a manipulação direta de objetos como um especto satisfatório para os usuários. A capacidade de visualizar e interagir diretamente com elementos, como circuitos integrados em engenharia eletrônica, é destacada como uma melhoria em relação às antigas interações baseadas em comandos via teclado.
Sendo assim o princípio da Transparência de Rutkowski é mencionado para explicar por que os usuários sentem satisfação ao interagir com sistemas que possibilitam manipulação direta, porque isso permite que eles apliquem o intelecto diretamente na tarefa, tornando a ferramenta em uso quase impercetível.
Sendo discutidos conceitos de manipulação direta com base em estudos de Hutchins colegas, que destacam o envolvimento direto com objetos como diferente de se comunicar por meio de intermediários. A relevância da psicologia no entendimento da satisfação do usuário em sistemas que permitem manipulação direta, citando estudos que demonstram a eficácia do uso de representações físicas, espaciais ou visuais em comparação com representações numéricas ou textuais. No entanto é de ressalta que a manipulação direta nem sempre é a melhor abordagem, especialmente em tarefas que exigem informações detalhadas e quando o campo visual está muito cheio de objetos. Representações gráficas podem se tornar confusas, e abordagens mais tradicionais, como tabelas, podem ser mais eficientes em certos contextos. Também são apontados desafios, como a necessidade de os usuários aprenderem o significado dos componentes das representações visuais.
O texto aborda a frustração de um casal ao lidar com uma máquina de lavar e secar roupas que, apesar de ter um design complexo e avançado, era difícil de usar devido à falta de clareza nos controles e na operação. O marido, psicólogo industrial, se recusava a lidar com a máquina, enquanto a esposa, médica, apenas memorizava um ajuste específico, ignorando o restante dos controles.
Apesar do esforço dos designers em considerar uma ampla variedade de tecidos e criar um design aparentemente avançado, a máquina falhava na usabilidade real. O autor argumenta que os fabricantes precisam entender que a experiência do usuário é fundamental e que um design ineficiente pode levar as pessoas a não usarem ou evitarem determinados produtos, apesar de suas capacidades técnicas.
O texto enfatiza a importância da visibilidade nos produtos, ou seja, a clareza e a facilidade de uso dos controles e das operações para que os usuários possam entender como interagir com o aparelho de forma intuitiva. Além disso, destaca que um excesso de visibilidade, resultando em muitos dispositivos e opções, pode ser tão intimidante quanto a falta dela.
Vinte mil objetos do quotidiano
O texto destaca a vasta quantidade de objetos comuns do cotidiano, enfatizando a complexidade por trás de cada um deles. O autor convida o leitor a observar ao seu redor para notar a diversidade e a quantidade de objetos presentes em um ambiente comum, desde itens de iluminação, eletricidade, utensílios de escrita, roupas com diferentes fechos e funcionalidades, mobília, utensílios de cozinha, até itens de escritório, entre outros.
O autor ressalta que cada objeto, por mais simples que possa parecer, possui seu próprio método de operação, necessitando ser aprendido e projetado separadamente. Ele menciona alguns exemplos, como um grampeador de mesa com 16 componentes, um ferro doméstico com 15 e a simples combinação de banheira e chuveiro com 23.
A ênfase está na ideia de que cada objeto requer sua própria atenção e design especializado, cada um com sua função específica, e que a diversidade e complexidade dos objetos do cotidiano podem passar despercebidas, mas contribuem para a variedade de habilidades e conhecimentos necessários para operá-los e utilizá-los de maneira eficaz.
Em resumo, o texto enfatiza a importância do design centrado no usuário, destacando que a visibilidade clara das funções e operações é essencial para uma experiência satisfatória do usuário, independente das capacidades técnicas avançadas do produto.
Modelos conceituais
mapeamentos. Examinem comObservem a bicicleta muito estranha apresentada na ilustração 1.4. Você sabe que ela não funcionará porque você forma um modelo conceitual do veículo e, mentalmente, simula sua operação. Você pode fazer a simulação porque as partes componentes estão visíveis e as implicações, claras.
Outras indicações sobre como as coisas funcionam vêm de sua estrutura visível – em particular de affordances, coerções e
atenção um par de tesouras: mesmo que você nunca as tenha visto ou usado antes, pode perceber que o número de ações possíveis é limitado. Os buracos claramente estão lá para enfiar alguma coisa neles, e as únicas coisas lógicas que caberão neles são dedos. Os buracos são affordances: eles permitem que os dedos sejam inseridos. Os tamanhos dos buracos são coerções para limitar os dedos possíveis: o buraco grande sugere vários dedos, o buraco pequeno só um. O mapeamento entre buracos e dedos – o conjunto de operações possí- veis- é sugerido e limitado pelos buracos. Além disso, a operação não é sen- sível ao posicionamento de dedos: mesmo se você usar os dedos errados, a tesoura funcionará. Você consegue descobrir como usar a tesoura porque suas peças de manejo são visíveis e as implicações, claras. O modelo conceitual é feito de maneira a tornar-se evidente, e há uso eficaz de affordances e coerções.
Agora, como um exemplo do contrário, examinem o relógio digital, um que tenha de dois a quatro botões de controle na frente ou do lado. Para que servem esses botões de pressionar? Como você acertaria a hora? Não há como dizer – nenhum relacionamento evidente entre os controles de operação e as funções, quaisquer coerções ou impedimentos, nenhum mapeamento apa- rente. Com a tesoura, mover as alças faz com que as lâminas se movam. relógio e o projetor de slides Leitz não fornecem qualquer relacionamento visível entre os botões e as ações possíveis, nem qualquer relacionamento dis- cernível entre as ações e o resultado final.
O switch é uma estrutura de decisão que executa um bloco de código específico caso o valor for verificado.
Essa estrutura possui dois comandos sendo “break” e “default” onde o break termina o trecho de codigo que foi executado e sai da estrutura, em contra partida o default ele é sempre executado quando nenhuma de opção for verificada funcionando como se fosse um “else” da estrutura if.
Capítulo 6
Vetores
Vetor é um tipo especial e muito usado na programação uma vez que nos permite aguardar subvalores dentro dele, ou seja é um tipo de variável em que na qual podemos armazenar vários elementos dentro dele.
6.1. Vetores de uma dimensão
Tal como se declara uma variável comum, declara um vetor diferenciando apenas por colchete depois do tipo veja:
// Uma variável apenas
double precoProduto = 150.0;
// Um vetor
double[] precoProduto;
Outra diferenca é que para usar um vetor temos que atribuir um valor que é o tamanho do vetor. Um vetor possui índice na qual podemos acessar a cada posição e conseguir alterar, buscar os valores nele contido, e esse índice vai de 0 até o tamanho do vetor menos uma unidade.
Inicialização do vetor sem valores:
tipo[] nomeVector = new tipo[tamanho];
ex: double[] precoProduto = new double[10]
Inicialização do vetor com valores pré definidos:
double[] precoProduto = new double[]{ 150.0, 20.0, 10.0, 100.0 };//Não é necessário especificar o tamanho porque ele assume por defeito o número de elemento indicado como seu tamanho.
Capítulo 7
Iteração
A iteração é um recurso muito preciso na programação, quando se que repetir muitas vezes um processamento e só varia quanto ao valor que ele manipula. Para isso existem estruturas como o for (laço for) e o while (laço while).
7.1. Iterando com o laço “while”
O laço while, quer dizer enquanto em português, é utilizado para iterações onde o que importa é alcançar uma determinada condição, um limite desconhecido, para finalizar o ciclo, ou seja, assim que a condição for falsa para a execução do bloco while.
Observe a estrutura while em baixo:
while ( condição ) {
// Bloco do while
}
7.2. Iterando com o laço “for”
O laço for ,para em português, é um tipo de iteração utilizada onde o número de vezes que se precisa iterar é conhecido o que o diverge do laço while.
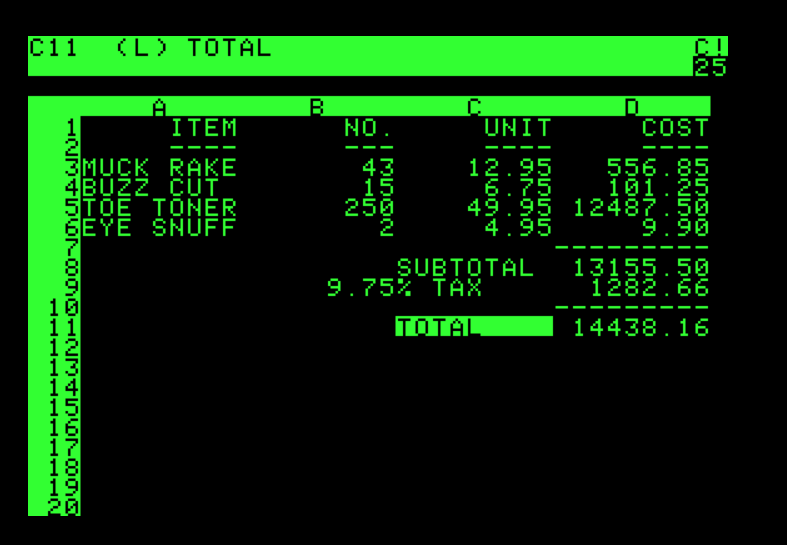
A primeira foi criada por Dan Bricklin e Bob Frankston , onde ele a batizaram com o nome de VisiCalc, que surgiu da necessidade de um dos seus criadores de estar farto de realizar cálculos repetitivos durante as tarefas do curso que ele frequentava em Harvard na altura, os criadores descreveram a ferramenta com uma folha de calculo automática que por meio da computação era possível mostrar o conteúdo digitado de forma imediata entre células dispersas entre um vetor de 254 linhas e 63 colunas capazes de realizar as operações pretendidas pelo seu utilizador.
Da mesma forma que vemos uma folha A4 quadriculado de um caderno de Estatística, eles conseguiram simular um trabalho de um contador que facilitava a compreensão do usuário e possibilitar o mesmo do poder de realizar um operação ou uma tarefa sobre um célula da folha de calculo.
Contudo os usuários após fazerem o uso da folha de calculo, maravilhados com o quão fácil era possível realizar cálculos extensivos e repetitivos , onde embora a singularidade do poder de calculo das células era possível visualizar o resultado dos seus cálculos , onde através da agregação das células era capaz de retornar um valor e esse mesmo valor era possível ser alterado ou corrigido em caso de erro com um simples alteração numa célula especifica alterando o valor do calculo pretendido no final, sendo que cada operação de calculo é feita com a mesma precisão que uma calculadora aplicada em cada bloco encontrado ao longo da folha. E futuramente a sua utilização foi melhorada e aplicada em varias áreas de atuação.
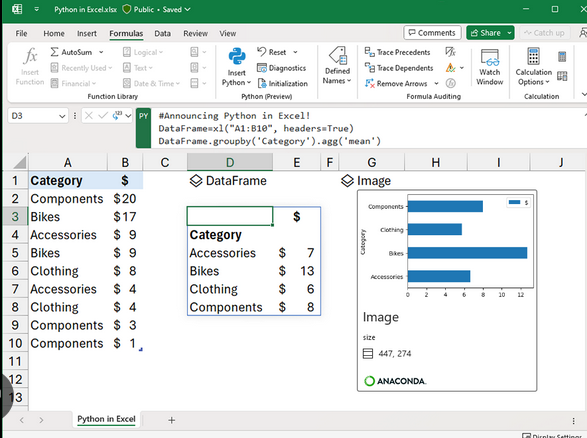
Atualmente as folhas de cálculos tem N funcionalidades que o seu utilizador terá de conhecer bem para poder realizara as suas tarefas, onde graças a esses dois estudantes o valor do seu contributo vive ate os dias atuais e o conceito utilizado por outras empresas, como por exemplo a Microsoft Excel.
Basada en el hardware y el software para crear simulaciones inmersivas. Para ello, se requieren computadoras potentes, estaciones de trabajo y supercomputadores.
Los dispositivos de entrada-salida especiales son esenciales para construir el entorno virtual.
Además, es fundamental la retroalimentación visual y se investiga la diferencia entre el tiempo de formación y la resolución gráfica en escenas 3D y 2D desde la perspectiva de hardware y software.
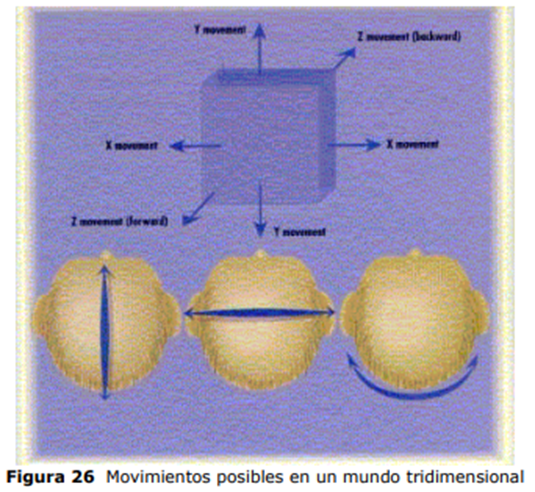
Seis grados de libertad
Permite el movimiento en tres direcciones espaciales y la orientación alrededor de los tres ejes. Los primeros tres grados corresponden al movimiento en los ejes X, Y, Z, pudiendo así determinar la posición del objeto en el mundo virtual desde la perspectiva del usuario. Los otros tres grados se refieren a la orientación del objeto alrededor de los ejes, conocidos como:
Pitch: es el desplazamiento angular del eje lateral en un plano horizontal perpendicular al eje lateral.
Yaw: es el desplazamiento angular del eje vertical.
Roll: es el desplazamiento angular del eje lateral.
Este término implica la capacidad de especificar la posición y orientación en seis coordenadas, permitiendo movimientos y giros completos en el espacio tridimensional.
Los usuarios utilizan los dispositivos de interfaz específicos para interacturar con los grados de libertad en entornos virtuales. Además, los valores absolutos se refieren a la posición y orientación de medidas desde un único punto de origen constante en el espacio virtual, ignorando las coordenadas anteriores si un objeto se mueve y se toman medidas niebas
Audio 3D
La investigación en audio se centra en la simulación del sonido original para mejorar la experiencia del usuario en entornos virtuales. La incorporación de un campo de sonido tridimensional en el mundo virtual es esencial, ya que refleja las condiciones ambientales. La simulación requiere una gran potencia y velocidad computacional debido a la complejidad del sistema auditivo humano,
que aprovecha la forma del oído exterior y los retardos en la llegada del sonido para determinar la posición de la fuente.
La evolución del sonido 3D parte del sonido monofónico, donde todos los sonidos parecen venir de una sola fuente. El sonido estereofónico simula que el sonido viene de entre dos altavoces, utilizando retrasos en las señales. El sonido ambiental, utiliza la idea estéreo con múltiples altavoces y retardos para simular movimientos de sonido.
La solución al desafío de crear un campo de sonido tridimensional personalizado radica en sintonizar el sonido a la cabeza del individuo. Colocar un micrófono en el canal del oído permite crear sonidos de referencia para rel ordendador, que luego resuelve relaciones matemáticas llamadas Funciones de Transferencia Relacionadas (HRTFs). Sin embargo, las medidas de las HRTFs, utilizadas por sí solas, no pueden simular exactamente el ambiente acústico debido a la dificultad de realizar medidas y la falta de consideración del oído medio o interno.
El sonido realista
La producción de sonido de fondo representa una carga computacional significativa en entornos virtuales, siendo fundamental para la inmersión y credibilidad del usuario. Aunque el sonido de fondo no requiere tecnología de sonido 3D, esto limita la interactividad del usuario en el ambiente virtual.
Algunos investigadores sugieren el uso de sonidos pregrabados para liberar potencia computacional y centrarse en determinar la posición y dirección de la fuente de sonido. Sin embargo, este enfoque no funciona bien en un campo de sonido 3D, ya que los sonidos pregrabados no permiten interactividad. En un ambiente acústico 3D, los sonidos deberían cambiar de posición cuando el oyente se mueve, lo cual no ocurre con sonidos pregrabados. A pesar de estas limitaciones, un ambiente con sonido realista tiene el potencial de servir como interfaz para personas con discapacidades auditivas o visuales. Podría proporcionar una experiencia de aprendizaje espacial similar a la forma en que las personas memorizan rutas sin necesidad de ver, convirtiéndose en una aplicación valiosa para la movilidad y orientación en entornos virtuales.
Navegación
Dispositivos de Posicionamiento
Al diseñar o evaluar el sistema de realidad virtual que utiliza un posicionador, es crucial prestar atención a:
Latencia o retardo: es el tiempo de retardo entre el cambio en la posición y orientación del objetivo y su informe al ordenador, debe ser inferior a 50 milisegundos para evitar molestias.
Tasa de actualización: indica cuántas veces por segundo el posicionador reporta datos a la computadora, suele oscilar entre 30 y 60 actualizaciones por segundo.
Resolución: dependerá del tipo de posicionador utilizado y generalmente disminuye a medida que el usuario se aleja del punto de referencia fijo.
Exactitud del sistema: generalmente disminuirá a medida que el usuario se aleja del punto de referencia fijo.
Existen varios tipos de tecnologías para dispositivos de posicionamiento de seis grados de libertad, donde cada una tiene sus propias características y aplicaciones específicas en entornos de realidad virtual. Donde distinguimos:
Posicionadores Mecánicos: es una estructura articulada con eslabones rígidos, una base de soporte y un “órgano terminal activo” que se sujeta a la parte de cuerpo a posicionar, como puede ser un brazo robótico. Este es rápido, preciso. Sin embargo, también presenta limitaciones como que puede afectar al movimiento natural del usuario, etc.
Posicionadores Electromagnéticos: permite posicionar varias partes del cuerpo simultáneamente al generar tres campos electromagnéticos perpendiculares entre sí. La fuente produce estos campos, y el detector sobre el cuerpo del usuario mide la interacción con dichos campos y envía la información a la computadora. Esta última triangula la distancia y orientación de los ejes relativos a los campos electromagnéticos. Aunque son populares, presentan inexactitudes y sufren de problemas como latencia, distorsión de datos y vulnerabilidad a grandes cantidades de metal en el entorno o a otros campos electromagnéticos. Además, el detector debe estar dentro de un rango restringido desde la fuente para proporcionar información precisa, limitando el volumen de trabajo del usuario.
Posicionadores Ultrasónicos: utilizan tres emisores de ondas sonoras de alta frecuencia en una formación rígida como fuente, con tres receptores también dispuestos rígidamente en el usuario. Hay dos métodos para calcular la posición y orientación:
“Fase coherente”: se detecta la posición y orientación calculando la diferencia en fases de las ondas sonoras que llegan a los receptores desde los emisores. Pueden acumular errores con el tiempo
“Tiempo-de-vuelo”: se mide el tiempo que tarda el sonido, emitido en momentos conocidos, en llegar a los sensores. Tienen una baja tasa de actualización
A diferencia de los posicionadores electromagnéticos afectados por grandes cantidades de metal, los ultrasónicos no enfrentan este problema. Sin embargo, también tienen un volumen de trabajo limitado y requieren una línea de visión directa desde el emisor al detector.. Ambos tipos son sensibles a cambios de temperatura, presión y nivel de humedad en el entorno de trabajo.
Posicionadores Infrarrojos: utilizan emisores fijos dispuestos en un arreglo rígido, mientras que cámaras o “celdas cuadradas” capturan la luz infrarroja. Para determinar la ubicación, un ordenador realiza triangulación basada en los datos de las cámaras. No se ve afectado por grandes cantidades de metal, posee una alta tasa de actualización y una baja latencia. Sin embargo, los emisores deben estar directamente en la línea de visión de las cámaras o celdas cuadradas. Además, cualquier otra fuente de luz infrarroja, luz intensa u otro brillo puede afectar la precisión de la medición.
Posicionadores Inerciales: permiten al usuario moverse dentro de un volumen grande de trabajo sin la restricción de hardware o cables conectados a un ordenador. Estos dispositivos aplican el principio de conservación del momento angular. Los giroscopios en miniatura, que pueden sujetarse a los HMDs, son utilizados para medir el yaw, pitch y roll, pero pueden desviarse (hasta 10 grados por minuto) y ser sensibles a la vibración. Para el seguimiento de posición, se requiere otro tipo de seguimiento.
Los acelerómetros son una opción adicional, pero también pueden desviarse y su salida puede ser distorsionada por el campo de gravedad.
Elementos a tener en cuenta en un sistema de realidad virtual
Se deben tener en cuenta los siguientes elementos:
Dispositivos de interfaz y manipulación: donde distinguimos:
Guantes: para detectar la flexión de los dedos, se han desarrollado tres tipos de tecnología de guantes: sensores de fibra óptica, medidas mecánicas y galgas extensométricas. Un ejemplo es el DataGlove, PowerGlove o la Mano Maestra Diestra.
La principal ventaja es proporcionar una interfaz más intuitiva ya que permiten que el ordenador lea y represente gestos de la mano, lo que facilita acciones como agarrar y manipular objetos en el entorno virtual, apuntar en la dirección deseada y cerrar ventanas. Sin embargo, se destaca la necesidad de desarrollar conjuntos de comandos más avanzados y mejorar la retroalimentación para el usuario.
Ratones 3D: están basadas en una modificación del ratón convencional o bola de posicionamiento que incorpora un dispositivo para determinar la ubicación y orientación. Son familiares o intuitivos para los usuarios. Sin embargo, su utilidad se limita principalmente a la navegación y la selección de objetos.
Palancas de Mando: funciona de manera similar a la palanca de mando convencional, pero no está fija a una base en una mesa. Cuenta con un dispositivo para determinar su orientación, permitiendo que el usuario la sostenga y manipule libremente.
Tracking
Visualización: donde distinguimos:
Lentes LCD Resplandecientes: tienen la apariencia de anteojos y cuentan con un fotosensor para recibir señales de la computadora. Estas señales indican si se permite que la luz pase por el lente izquierdo o derecho. La pantalla del ordenador muestra la escena correspondiente al ojo izquierdo o derecho del usuario, alternando a 60 Hertz, generando un efecto tridimensional continuo mediante el paralaje. Aunque estas lentes son ligeras y sin cables, el usuario debe mirar fijamente la pantalla de la computadora para experimentar la escena tridimensional, limitando el campo de visión y afectando la inmersión en el entorno virtual.
Cascos: colocan una pantalla frente a cada ojo del usuario y controlan la vista mediante la orientación de los sensores incorporados. El movimiento de la cabeza es reconocido por el ordenador para generar una nueva perspectiva. Generalmente, se utilizan lentes ópticos y espejos para ampliar la vista y llenar el campo visual. Se discuten cuatro tipos de cascos para proporcionar experiencias inmersivas:
Dispositivo HMD con LCD: utilizan píxeles de cristal líquido para presentar la escena. Cuando se activa un píxel, bloquea la luz, y miles de estos píxeles forman una matriz bidimensional en cada pantalla. Aunque estos HMD son más ligeros, ofrecen un efecto de inmersión con baja resolución y contraste. La polarización de los cristales puede causar un ligero retardo, afectando la percepción de la posición de los objetos.
HMD Proyectado: con tecnología de cables de fibra óptica transmiten la escena a una pantalla parecida a un tubo de rayos catódicos (TRC), iluminando el fósforo con luz transmitida a través de las fibras. Aunque ofrecen una mayor resolución y contraste en comparación con los HMD de LCD, son más costosos y difíciles de fabricar. Proporcionan una visualización detallada y son livianos, pero su costo es una desventaja significativa.
El HMD con TRC Pequeño: utiliza dos TRCs posicionados en el lateral, con espejos para dirigir la escena hacia los ojos del usuario. A diferencia del HMD proyectado que emplea cables de fibra óptica para iluminar el fósforo, este utiliza un rayo de electrones convencional. Aunque similar al HMD proyectado, el HMD con TRC es más pesado y puede resultar incómodo para el usuario debido al calor generado por los componentes electrónicos y el peso del dispositivo.
El HMD con LED de Columna Única: utiliza una columna de LEDs y un espejo oscilante para reflejar la imagen hacia los ojos del usuario. Los LEDs se actualizan 720 veces por oscilación del espejo, formando la imagen de la pantalla virtual. Este tipo de HMD permite la interacción simultánea con el mundo virtual y real, creando una pantalla virtual que parece flotar en el entorno real. Un problema común en los HMDs es la restricción de movilidad causada por el cable que conecta el dispositivo a la computadora, lo que puede resultar en inconvenientes y fatiga para el usuario.
Monitor Omni-direccional Binocular (Binocular Omni-Orientation Monitor- BOOM): se monta en un brazo mecánico articulado con sensores de posicionamiento en las articulaciones y utiliza un contrapeso para mantenerse estable. Para ver el ambiente virtual, el usuario sostiene el monitor y el ordenador genera una escena basada en la posición y orientación del brazo mecánico. Este enfoque, conocido como despliegue BOOM, aborda algunos problemas asociados con los HMDs, ya que el usuario no tiene que llevar el dispositivo y puede cambiar fácilmente entre el mundo virtual y el real al apartar la vista del monitor.
La Cueva (the cave): es un entorno de vídeo y audio 3D de alta resolución multipersonal. Proyecta gráficos estéreo en tres paredes y el suelo, visualizados con gafas estéreo. Un usuario utiliza un sensor de posición que actualiza la perspectiva y las proyecciones estéreo mientras se mueve en los límites de visualización, creando la ilusión de imágenes 3D con presencia dentro y fuera de la sala de proyección. Para el usuario con gafas estéreo, las pantallas de proyección parecen transparentes, y el espacio de imágenes 3D da la sensación de extenderse al infinito.
Los objetivos incluyen lograr imágenes de alta resolución y visión envolvente sin distorsión geométrica, reducir la sensibilidad a errores de rotación de la cabeza, mezclar imágenes de realidad virtual con dispositivos reales, guiar y enseñar en mundos virtuales, y conectarse a la red y fuentes de información para mejorar el diseño. Proviene del acrónimo Cave Automatic Virtual Environment y hace referencia al “Símil de la Cueva” de Platón, explorando conceptos de percepción, realidad e ilusión.
Tecnología involucrada: tiene las siguientes especificaciones técnicas:
Tracker 6 DOF
Resolución de visualización: 2500 x 2000 por pantalla
Frecuencia de barrido horizontal: 15-130 kHz
Frecuencia de barrido vertical: 38-180Hz
Anchura de banda: 125 MHz
Dimensiones: 104″H x 73.5″ W x 84″ D
Aplicaciones: industria del petróleo, que aprovecha datos que han sido procesados en revisiones sísmicas parar proporcionar imágenes tridimensionales.
Ordenador: debe de ser rápido ya que trabaja en tiempo real. Una medida indirecta que puede servir es la potencia en megaflops. La medida directa es el número de polígonos por segundo (triángulos) que es capaz de procesar.
Software: lo podemos concretar como:
Bucle de eventos
Actualización de imágenes
Latencia del seguimiento del tracking
11. Interfaces hápticas
La realidad virtual enfrenta el desafío de la falta de estímulos para el sentido del tacto en los usuarios. La investigación en háptica se divide en dos subcampos:
Retroalimentación de fuerza (quinesética): implica dispositivos que interactúan con músculos y tendones para proporcionar al usuario la sensación de aplicar una fuerza correspondiente al entorno virtual.
Retroalimentación táctil: se ocupa de dispositivos que interactúan con los nervios terminales de la piel para indicar la presencia de calor, presión y textura.
Los dispositivos hápticos, al combinarse con despliegues visuales, pueden ser más útiles que las interfaces visuales solas. Se ha demostrado en experimentos que afectan positivamente el aprendizaje de los usuarios en comparación con aquellos que no tienen acceso a retroalimentación háptica.
Anatomía y Fisiología
Es crucial considerarla.
Retroalimentación de fuerza: se deben tener en cuenta las proporciones y fuerzas promedio de las articulaciones, especialmente en las manos.
Retroalimentación táctil: se deben considerar varias variables del sentido del tacto humano.
Los estudios indican que existe una relación fuerte entre las sensaciones táctiles y los movimientos de la mano para adquirir información. El sistema háptico
humano comprende dos subsistemas: el motor y el sensorial, con una conexión significativa entre ambos. Se destaca la importancia no solo de lo que el sistema sensorial detecta, sino también de los movimientos utilizados para obtener esa información.
Se emplean dos formas de exploración háptica:
Activa: cuando el usuario controla sus propias acciones, y pasiva, cuando la mano o el dedo del usuario es guiado por otra persona.
Pasiva: a menudo muestra una mayor precisión en la identificación de formas. Además, los usuarios tienden a descomponer tareas multidimensionales en problemas de una o dos dimensiones.
Un factor crítico es la situación en la que hay contradicción entre pistas visuales y hápticas, donde la pista visual tiende a predominar sobre la háptica.
Dispositivos
Podemos distinguir:
CyberTouch: es un dispositivo háptico que se integra con Cyberglove y presenta pequeños estimuladores vibrotáctiles para cada dedoSon programables individualmente para ajustar la fuerza de la sensación táctil, permitiendo generar desde impulsos simples hasta vibraciones complejas. Los desarrolladores de software pueden diseñar perfiles de actuación personalizados para lograr sensaciones táctiles deseadas, como la percepción de tocar un objeto sólido en un entorno virtual. Es esencial para aquellos que desean interactuar con objetos en un mundo virtual utilizando las manos, brindando la capacidad de sentir y sostener objetos virtuales sin necesidad de mirar.
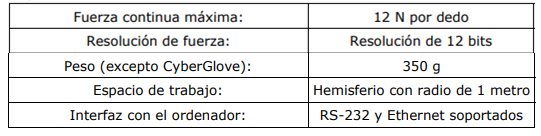
CyberGrasp: es un exoesqueleto ligero y no obstrusivo diseñado para trabajar en conjunto con CyberGlove®. Proporciona a los usuarios la capacidad de “tocar” objetos generados por ordenador y experimentar retroalimentación realista de fuerza a través de la mano. Este sistema permite explorar las propiedades físicas de objetos en 3D y manipularlos en un entorno virtual. Utiliza tendones y actuadores para ejercer fuerzas relacionadas con la manipulación de objetos, asegurando que los dedos del usuario no penetren ni aplasten los objetos virtuales. Con cinco actuadores, uno para cada dedo, el dispositivo permite movimientos completos de la mano sin obstrucciones y es ajustable para adaptarse a diversas manos.
Aplicaciones
Presenta diversas aplicaciones potenciales en el mundo real, abarcando áreas como la medicina, el entrenamiento y la simulación virtual, el diseño asistido por ordenador.
Especificaciones técnicas
Requisitos
1) Se necesita un CyberGlove de 22 sensores para usar CyberGrasp.
2) Un sensor de posiciones de 6 DOF. Los sistemas válidos en la actualidad son:
Ascension Flock of Birds™
Polhemus Fastrak® e Isotrak II®
12. Realidad Aumentada (AR)
Combina gráficos 3D y texto superpuesto sobre imágenes y vídeos reales en tiempo real para mejorar la información del entorno. Esta tecnología realza la realidad mediante información instructiva de objetos o datos, proporcionando a los usuarios información visual adicional relacionada con objetos en la realidad. La AR puede utilizar dispositivos similares a los utilizados en entornos virtuales.
13. Pantallas Táctiles
Permiten a los usuarios señalar y seleccionar objetos directamente en la pantalla mediante el dedo, eliminando la necesidad de un dispositivo apuntador adicional. Existen diversos tipos de pantallas táctiles. Este dispositivo es altamente intuitivo y no requiere asociaciones específicas para su funcionamiento. Son especialmente útiles en aplicaciones para el público en general. Entre sus ventajas se encuentran su facilidad de aprendizaje, falta de necesidad de espacio adicional, ausencia de piezas móviles y durabilidad. Sin embargo, presentan desventajas como la posible acumulación de marcas de grasa en la pantalla, fatiga con el uso continuo y limitada precisión en tareas detalladas como el dibujo.
14. El Lápiz
Utilizado principalmente para seleccionar objetos en la pantalla o realizar trazados. Es más intuitivo que un ratón, pero su aplicación es más limitada. El lápiz tiene un fotodetector en la punta que detecta la luz emitida desde el píxel en la pantalla. Al pulsar un botón, conectado al circuito de barrido de la pantalla, se determinan las coordenadas en las que está posicionado el lápiz. Puede haber problemas cuando el píxel no está iluminado, y para evitar esto, se pueden utilizar diversas alternativas, como seleccionar objetos encendidos, controlar un cursor que sigue al lápiz o iluminar la pantalla al presionar el botón del lápiz.
La principal ventaja del lápiz es su capacidad para apuntar y manipular la interfaz sin necesidad de una superficie de apoyo. Facilita la movilidad y permite la interacción en situaciones donde no se dispone de una superficie plana. Sin embargo, levantar el lápiz puede causar fatiga y obstruir la visión de la pantalla.
El hardware lo permite
La tecnología de digitalización es fundamental para el funcionamiento del ordenador con lápiz. Un digitalizador, una reja plana, genera coordenadas x, y cuando un lápiz se sitúa encima o muy cerca de él. La interacción del lápiz con el digitalizador produce una interrupción, y la tinta digital puede o no aparecer en la pantalla. Cuando el lápiz toca una región que acepta escritura. Si el lápiz toca un control que no espera escritura, se reconoce como un dispositivo apuntador, y no se genera tinta. Más allá del hardware especial para la entrada del lápiz, los sistemas con lápiz son prácticamente iguales a los ordenadores portátiles.
Tinta digital, gestos y Jot
Abarca dos componentes principales:
Escritura manual: produce tinta digital, que se guarda en una estructura de datos.
Gestos: son símbolos escritos, funcionan como comandos de aplicación.
La tinta digital requiere una estructura de datos para almacenar la escritura manual, y un API para manipularla. Esta información va más allá de un simple mapa de bits, ya que la orden de trazado y el tiempo en que se ha escrito también forman parte de la estructura de datos.
Jot
Es un estándar de intercambio de tintas que se refiere a la información capturada por un ordenador con lápiz al escribir en él. La tinta comprende más que simples datos de mapa de bits; además de las coordenadas x, y de los píxeles, incluye información detallada, el tiempo, la presión aplicada, el color, el ángulo del lápiz y los movimientos relativos, entre otros. Esta información no solo se visualiza como un mapa de bits en la pantalla, sino que puede convertirse en texto u objetos gráficos. Aunque es un estándar de facto en la industria, destaca por haberse establecido antes de las necesidades específicas del cliente.
Tecnología de reconocimiento de escritura manual
El reconocimiento de escritura manual puede ser de dos tipos:
Continua: implica una mezcla de caracteres escritos.
Discreta: implica levantar el lápiz entre cada letra.
Cada tipo de escritura requiere un enfoque diferente.
Algunos productos emplean el modelo matemático de Horabach, que define conjuntos de movimientos simulados de la mano basados en movimientos circulares. Este enfoque es eficaz para la escritura cursiva pero puede no funcionar tan bien para letras mayúsculas impresas.
Otras soluciones utilizan una aproximación más intuitiva, que implica el uso de plantillas y tramas. El reconocedor compara esquemas básicos con marcas a reconocer, subdivididos en subalfabetos para mapear la entrada a alfabetos específicos del lenguaje durante el proceso de reconocimiento.
Independientemente de la aproximación, los reconocedores de escritura manual se presentan en dos formas:
Entrenables: puede ser entrenado por el usuario.
No entrenables
15. Webcam
Son dispositivos de videocámara diseñados para ordenadores que digitalizan imágenes y las transmiten a través de internet.
Partes Básicas
Consta de tres componentes:
Cámara: tiene que ser compatible con el PC.
Tarjeta digitalizadora (Frame Grabber): recibe la imagen captada por la cámara y la digitaliza en frames. La captura se suele realizar a una velocidad de 15 a 20 cuadros por segundo (fps).
Software: controla la tarjeta o el chip digitalizador. El programa envía órdenes de captura a la cámara, esta recibe el intervalo de apertura del objetivo y devuelve una señal digital con la información en un formato compatible con los navegadores de Internet. Estos archivos, en el caso de imágenes secuenciales, se transmiten mediante FTP al servidor conectado a Internet.
Conexiones y formatos
Existen diversos estándares y protocolos para la transmisión de imágenes en vivo, adaptados a las prestaciones de cada equipo:
Estándares de Transmisión:
H.320: diseñado para RDSI, es un sistema rápido dirigido a usuarios profesionales.
H.323: similar a H.320, pero requiere conexión TCP/IP. Es ampliamente utilizado en entornos domésticos.
1-1.324: tecnología avanzada para comunicación por telefonía móvil, aún en desarrollo.
Protocolos para Transferencia de Imágenes Secuenciales:
CIF (Common Intermediate Format): resolución de 352×288 ppp, muy utilizada.
QCIF (Quarter CIF): resolución de 176×144 ppp.
OCIF: resolución de 128×96 ppp.
4CIF: resolución de 704×576 ppp.
16CIF: imagen de alta resolución con 1408×1152 ppp.
Recomendaciones para distintos usos
Podemos distinguir:
Cámaras Plug & Play: son cámaras típicas para usuarios domésticos. Se destacan por su precio asequible y facilidad de instalación, aunque ofrecen tasas de captura de imagen más bajas en comparación con las cámaras conectadas a tarjetas PCI de videocaptura. Estas cámaras se conectan mediante puertos serie, paralelo o USB, siendo este último el más recomendado. Aunque son adecuadas para la captura de imágenes, su rendimiento en la transmisión de video es limitado.
Captura y edición de vídeo profesional: ofrecen altas tasas de captura. Estos dispositivos son similares a los utilizados en entornos domésticos y semiprofesionales. Además del dispositivo de captura, se requiere una tarjeta ISA o PCI conectada al PC para recibir, procesar y digitalizar las señales del dispositivo. Algunos modelos de capturadoras recientes incorporan conexiones al puerto USB o paralelo, aunque ocupan un slot PCI. Es importante tener en cuenta la compatibilidad entre el dispositivo de captura y la tarjeta del ordenador, considerando los estándares NTSC, SECAM o PAL según la región. Estas videocámaras con captura son ideales para usuarios avanzados que buscan una edición o videoconferencia con calidad profesional, aunque presentan mayores costos y consumo, y su manejabilidad puede estar más limitada.
Cámaras especiales NetWork: están limitadas en su expansión comercial debido a su precio y sus características. Estos dispositivos tienen la capacidad de conectarse a una red y transmitir imágenes sin necesidad de una configuración compleja del equipo. Aunque suelen ser relativamente caras, su costo puede ser más accesible si se considera el precio total del conjunto que incluye el ordenador, la videocámara y la tarjeta de captura. Ofrecen una excelente calidad tanto en imagen como en tasas de captura y solo requieren una conexión LAN o telefónica para capturar las imágenes que la cámara emite. Debido a su bajo mantenimiento y la capacidad de ubicarse en cualquier lugar, son una buena alternativa para sistemas de seguridad, mantenimiento o supervisión.
16. Rastreo ocular
El ojo humano ha sido objeto de numerosos estudios a lo largo de la historia, desde teorías antiguas basadas en suposiciones hasta los métodos científicos actuales. El estudio de los movimientos oculares y la comprensión de la estructura y el funcionamiento del ojo han llevado al desarrollo de dispositivos experimentales.
Funcionamiento
Se basa en la técnica centro pupilar/reflexión corneal (PCCR). Un haz infrarrojo emitido por un diodo LED ilumina el ojo, y su reflejo en la córnea (punto especular) es captado por una videocámara sensible a infrarrojos. La cámara, enfocada hacia el ojo, recoge imágenes para que un ordenador calcule la posición del centro de la pupila y la dirección de la mirada.
El método de pupila brillante, derivado de este enfoque, utiliza el reflejo de la retina para determinar el centro de la pupila, lo que mejora el contraste en entornos con luz infrarroja limitada. Los requisitos para este sistema incluyen precisión, resolución, rango, rango dinámico, frecuencia de muestreo, latencia, independencia de movimientos de la cabeza y más.
Problemas y limitaciones
Tiene limitaciones notables, siendo intolerante al movimiento de la cabeza. Para proporcionar estimaciones precisas, la cámara debe hacer zoom en el ojo, restringiendo el área de visión del usuario y limitando su movimiento. Fijar la cámara a la cabeza del usuario reduce el movimiento relativo de la cabeza. Otros posibles errores incluyen retardos en la transmisión de datos (lag) y problemas de precisión en ángulos límites. La naturaleza intrusiva del sistema, al introducir un haz infrarrojo en el ojo, plantea posibles preocupaciones. La fatiga visual y la adaptación del usuario al sistema también son consideraciones importantes, y la interpretación de la mirada del usuario puede ser complicada, ya que no siempre indica intención de acción. En algunos sistemas, se aprovecha la atención visual del usuario para personalizar la interacción.
Futuras investigaciones
Apuntan hacia la independencia del rastreo ocular respecto al movimiento de la cabeza y la resolución del problema de distinguir. Se sugiere explorar la idea de Interest and Emotion Sensitive media (IES), dispositivos sensibles a intereses y emociones, que aprovechen la dirección de la visión y medidas afectivas para evaluar el interés del usuario en objetos y su disposición a interactuar. Se plantea la necesidad de rastreadores oculares capaces de seguir varias personas simultáneamente, identificar a las personas rastreadas mediante reconocimiento del iris, y la posibilidad de crear una base de datos con las características y preferencias individuales. Se cuestiona la ética y la privacidad en relación con el rastreo ocular y se compara con el rastreo de teclados en cajas registradoras. Se destaca la utilidad potencial de los rastreadores oculares en tareas de vigilancia, facilitando el acceso rápido y preciso a gran cantidad de información, y su aplicabilidad en la mejora de la calidad de vida de personas discapacitadas.
17. Escáner
Es un dispositivo de entrada que captura gráficamente información para su procesamiento posterior. Existen varios tipos de digitalizadores, cada uno diseñado para cumplir con requisitos específicos:
Digitalizadores a base de tubos de rayos catódicos (TRC): utilizan un TRC para dirigir un haz de luz sobre la superficie a digitalizar.
Digitalizadores de impresora: se colocan detectores en el cabezal de impresión de una impresora raster, que imprime una imagen en blanco sobre la zona a digitalizar mientras se lee la información. Es una opción de bajo costo.
Digitalizadores de tambor: capaces de digitalizar transparencias y material reflectivo. Trabajan con tamaños desde 35 mm hasta paneles grandes.
Digitalizadores de documentos compactos: diseñados para reconocimiento automático de caracteres y manejo de documentos.
Digitalizadores para fotografías: funcionan desplazando una fotografía sobre una fuente de luz fija.
Digitalizadores de transparencias: utilizados para digitalizar elementos transparentes o translúcidos.
Digitalizadores de mano: capaces de leer una pequeña fila del documento en cada instante. Se desplazan manualmente sobre la superficie y son económicos, aunque su calidad no es alta.
Digitalizadores de tableta: ampliamente utilizados por su versatilidad, capturan fotografías, dibujos en color, páginas de libros y revistas. Miden la intensidad y el color de puntos en un rectángulo.
Digitalizadores 3D: específicos para figuras tridimensionales, utilizan una cámara digital para proporcionar imágenes digitales 3D, pero son costosos y especializados.
Funcionamiento
Los escáneres convierten la luz en datos digitales mediante el principio de reflexión o transmisión de la luz. La imagen se sitúa debajo del cabezal lector, compuesto por una fuente de luz y un sensor que mide la cantidad de luz reflejada o transmitida. Posteriormente, la información analógica se transforma en digital mediante un conversor analógico/digital (A/D).
El sensor de luz comúnmente es un dispositivo CCD (Charge Coupled Device) que convierte la intensidad de luz en un voltaje proporcional. El cabezal incluye miles de estos elementos dispuestos en una tira. El escáner emite luz sobre tres filtros (rojo, verde y azul), y la luz reflejada en el documento se dirige hacia la tira de sensores mediante espejos y lentes. El CCD actúa como un fotómetro que genera un voltaje, transformándose luego en información digital.
Actualmente, se emplea la tecnología CIS (Contact Image Sensor) que utiliza bancos de LEDs rojos, verdes y azules en lugar de espejos y lentes. Esta tecnología, al ubicar la fila de sensores cerca de la imagen, permite que el digitalizador sea más delgado y ligero, con menor consumo y costo. No obstante, su calidad es inferior, ya que solo es efectivo para imágenes completamente planas.
Se recomienda una fuente de iluminación incolora, pero para documentos de texto se utiliza una fuente roja, para fotografías en blanco y negro una verde, y para imágenes en color, los tres colores básicos.
Parámetros de un digitalizador
La calidad de un escáner se determina por varios parámetros:
Resolución:Mide el detalle que el escáner puede distinguir y se expresa en puntos por pulgada (ppp).El número de CCD en el cabezal indica la tasa de muestreo horizontal, y los intervalos por pulgada indican la tasa de muestreo vertical.La verdadera resolución depende de la calidad de los componentes electrónicos, lentes, filtros y el control del motor paso a paso.Los escáneres actuales usan interpolación para mejorar la resolución, logrando hasta 9600 ppp, aunque la resolución real suele estar entre 600 y 1200 ppp.Resoluciones características: diapositivas, fotografías, páginas web, periódicos y revistas, texto y dibujos.
Color:
Los escáneres en color utilizan tres fuentes de luz para cada color primario.
Algunos emplean un único tubo fluorescente y tres CCD por píxel, lo que permite digitalizar la imagen en una sola pasada.
Hay dos métodos para leer la imagen: uno utiliza un prisma para separar los colores y tres CCD distintos, mientras que el otro utiliza tres CCD recubiertos con filtros.
Profundidad de bit (bit-depth):
Indica la cantidad de información que se puede recoger por punto digitalizado.
En la digitalización con color verdadero, se almacena un byte de información por cada color primario.
Actualmente hay digitalizadores de 30 y 36 bits.
Rango dinámico:
Indica los rangos de tonos que puede almacenar el escáner, medido en una escala de 0.0 (blanco perfecto) a 4.0 (negro perfecto).
Depende de la calidad de los convertidores A/D, la pureza de la luz, la calidad de los filtros y el ruido eléctrico.
Se asigna un valor que indica el porcentaje del rango que puede distinguirse. Los escáneres habituales tienen un rango dinámico de 2.4, mientras que los profesionales llegan a 2.8 a 3.2 y los de tambor hasta 3.8.
A pesar de que un escáner de 24 bits teóricamente tiene un rango de 8 bits para cada color primario, los bits menos significativos se desprecian para evitar el ruido, perdiendo calidad.
18. Ordenadores corporales
Buscan cambiar la forma en que interactuamos con los ordenadores. En contraste con los ordenadores personales tradicionales que suelen estar en mesas y tienen interacciones limitadas, los dispositivos corporales se integran en la vestimenta y se utilizan en función del contexto. Equipados con pantallas en la cabeza, dispositivos de entrada discretos, redes inalámbricas personales y sensores de contexto, estos ordenadores pueden servir como asistentes inteligentes para tareas.
Ao fazer uma modelagem você cria uma simplificação de realidade para entender o melhor sistema em desenvolvimento. A UML define 9 tipos de diagrama
Diagrama UML e usado de 2 maneiras básicas 1:para especificar modelos a partir dos quais será construído um sistema executável 2:para reconstruir modelos a partir partes de um sistema executável