A manipulação direta remota e ambientes virtuais, destaca oportunidades e desafios associados a essas tecnologias. Na manipulação direta remota, são mencionados benefícios para áreas como automação de escritório, colaboração apoiada por computador (CSCW), telemedicina e educação à distância. A aplicação remota em medicina permitiria o acesso a especialistas em regiões menos desenvolvidas, facilitando exames e diagnósticos por meio de controle remoto de dispositivos.
Porém a arquitetura de ambientes remotos apresenta desafios, incluindo retardos de transmissão e operação, feedback incompleto, feedback de fontes múltiplas e interferências imprevistas. Estratégias sugeridas para mitigar esses problemas incluem a minimização do volume de dados, canais de comunicação redundantes e comunicação assíncrona.
Em ambientes virtuais, e destacada a importância de simuladores de voo para treinamento de pilotos, ressaltando a elevada viabilidade econômica desses projetos. Componentes como telas de alta resolução, sistemas estéreos, e cadeiras com motores hidráulicos são utilizados para criar uma experiência imersiva. Também discute-se o potencial benefício de sistemas de realidade virtual na formação de profissionais de saúde, permitindo treinamento à distância.
Os princípios de manipulação direta discutidos são considerados relevantes para o design de sistemas de realidade virtual, enfatizando a importância da seleção rápida de ações, controles incrementais e a imediata mudança de estado do sistema após cada ação do usuário. Todos esses princípios visam reforçar o aprendizado, e aumentar a performance e a satisfação subjetiva do usuário.
Neste resumo vamos dar continuidade nos assuntos abordados no resumo anterior.
Explicações acerca da manipulação direta Vimos que de acordo com o Princípio da Transparência de Rutkowski em 1982, os utilizadores sentem satisfação interagir com sistemas que possibilitam a manipulação direta porque são “capazes de aplicar o intelecto diretamente na execução da tarefa em questão; a ferramenta em uso tende a desaparecer”. (HECKEL, 1991) lamenta que “Nossos instintos e treinamento de engenheiros encorajam-nos a pensar logicamente em vez de visualmente e isso é contraproducente em na construção de sistemas amigáveis.”
Hutchins e colegas reveem os conceitos de manipulação direta e oferecem uma inteligente decomposição de conceitos. Eles descrevem um “sentimento de envolvimento direto num mundo de objetos, o que é bem diferente de se comunicar com ele através de um intermediário”.
A psicologia, em particular o estudo de como resolvemos problemas e como aprendemos, pode nos ajudar a entender a satisfação do utilizador em interagir com sistemas que permitem a manipulação direta.
(BRUNER et al. (1966) levou esse mesmo princípio para o ensino de fatoração polinomial. Finalmente, Arnheim (1969) mostrou que representações físicas, espaciais, ou visuais são mais simples de se memorizar do que representações numéricas ou textuais. Chega-se a conclusão, portanto, que nós humanos raciocinamos melhor em cima do concreto do que do abstrato. E isso é fácil de se entender. Ao raciocinarmos sobre coisas abstratas, temos que manter em mente, o seu significado. Quando temos evidências perceptivas dos objetos da ação, não precisamos fazer uma operação de transformação mental a mais. Assim nossas mentes estão mais livres para focar nos objetivos das nossas tarefas.
Manipulação direta pode não ser sempre a melhor saída Representações espaciais ou visuais não se constituem necessariamente uma interface superior quando comparadas a interfaces mais tradicionais. No desenvolvimento de sistemas, por exemplo, os diversos diagramas são úteis até certo ponto. Diagramas complexos facilmente se tornam confusos e difíceis de ler.
Estudos mostram que abordagens gráficas são mais eficientes quando a tarefa exige reconhecimento de padrões, mas não quando o campo visual fica muito cheio de objetos e a tarefa exige informações detalhadas. Para utilizadores experientes, uma tabela com cinquenta nomes de documentos pode ser mais apropriada do que apenas dez ícones de documentos abreviados de tal forma a caber no tamanho de ícone. Um segundo problema é que os usuários devem aprender o significado dos componentes das representações visuais. Um ícone, por exemplo, pode ter um significado para o projetista, mas pode requerer um tempo de aprendizado igual ou maior de aprendizado que uma palavra. Em aeroportos, por exemplo, devido ao fato de servirem a uma comunidade multi-línguas, boa parte da comunicação é feita por meio de ícones cujo significado nem sempre é óbvio. Outra questão é a que em vários casos, utilizadores experientes, por motivo de performance, preferem usar teclado a ter que parar a digitação, procurar o mouse e apontar para o objeto na tela. O teclado continua sendo o dispositivo de manipulação direta mais efetivo para diversos tipos de tarefas. A escolha dos objetos e ações adequados para cada tipo de tarefa não é necessariamente algo simples. Metáforas, analogias e modelos com um mínimo conjunto de conceitos são um bom ponto de partida. Problemas podem surgir quando o projetista escolhe uma metáfora não apropriada ou de difícil entendimento para a comunidade de usuários. Em geral, o projetista tem formação diferente daquelas pessoas que fazem parte da comunidade de utilizadores e não convive com elas. Assim é importante que o projetista apresente e teste seu modelo conceitual com membros da comunidade o mais cedo possível no processo. É também recomendável a confecção de um documento que apresente o modelo com suas suposições e limitações.
Ambientes de desenvolvimento de sistemas baseados em manipulação direta Não basta produzir programas de computador que implementem a manipulação direta. Um ambiente de desenvolvimento de sistemas que implemente tais conceitos, certamente aumenta a produtividade do programador. Na programação de robôs, um exemplo, os profissionais primeiro testam os movimentos necessários para uma determinada tarefa, um a um, antes de executar a sequência toda em alta velocidade. Esse conceito de programação de manipulação direta também se aplica a brocas de precisão, câmeras de televisão com movimento previamente definido, etc. Esse conceito foi levado para a automação de escritório sob a forma de macros. Macros nada mais são do que um conjunto de comandos previamente gravados que, quando acionadas, as executam trazendo produtividade e diminuindo os erros do operador. Durante a execução de uma macro outra pode ser chamada, o que aumenta e muito as possibilidades de construção de encadeamento complexo de ações. Hoje programas de automação de escritório como o Excel possuem sua própria linguagem de programação que permite aos seus usuários a criação de partes de programas que são capazes de executar operações em planilhas eletrônicas.
AUTORES : Bruno Batista Boniati E Teresinha Letícia da Silva
Resumo das páginas 68-84 ( 7ª RESUMO)
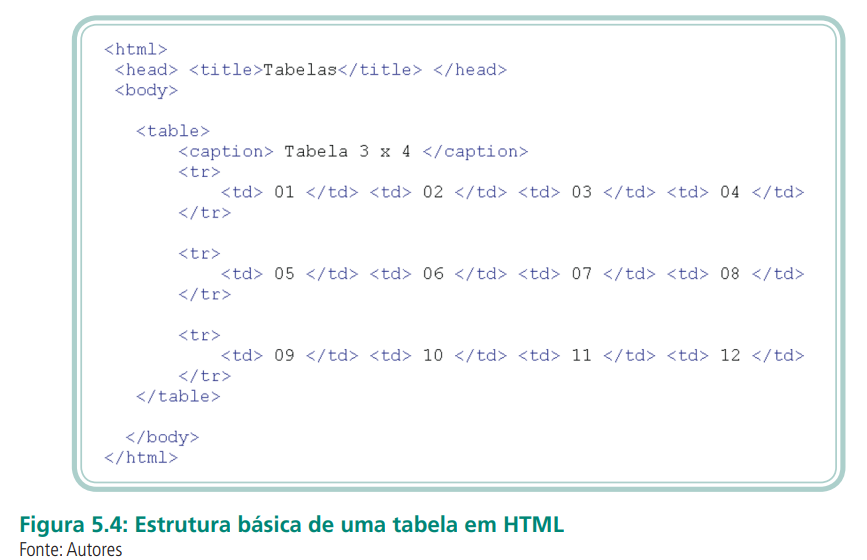
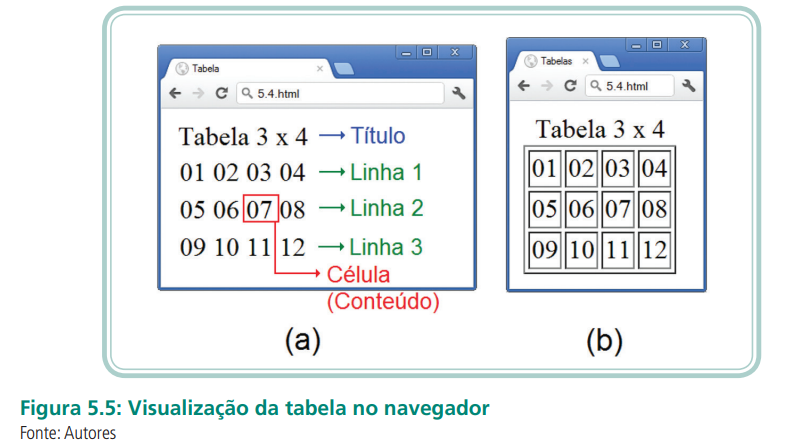
Tabelas
Uma tabela em HTML , é formada por um quadro que pode ter títulos , divido em linhas , sendo cada linha também dividida em colunas . O uso da tabelas é recomendado quando se faz necessário tabular dados em forma de grade . A tag inicial que delimita o espaço da tabela é a O próximo é definir o conteúdo que estará dentro da tag , sabendo que essa tag é do tipo container o próximo passo é definir as linhas contidas nela . Para isso , usa-se a tag que também é do tipo container . Cada tag também será dividida em quantas colunas se fizer necessário . As colunas da tag são delimitadas pelo uso da tag e é nessa tag que os dados serão informados .
Para apresentar as linhas divisórias presente na figura 5.5b , é necessário utilizar o parâmetro border (borda) junto a tag da seguinte maneira : <table border = “1”>.
Introdução ao uso de formulários web
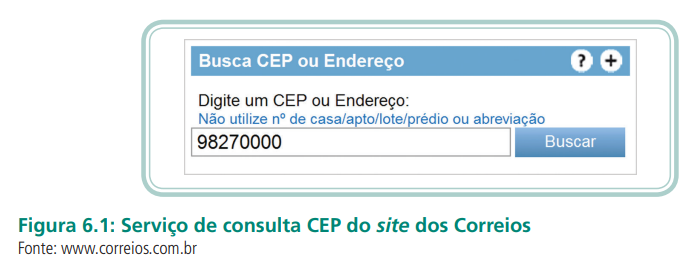
A partir do momento em que se faz necessário desenvolver páginas web , também surge a necessidade de criar elementos de interação com o público . Por meio disso surge a necessidade de criar formulários . Como por exemplo o serviço de consultas de CEPs dos correios . Por meio desse serviço , o formulário apresentado abaixo é ilustrado para o usuário .
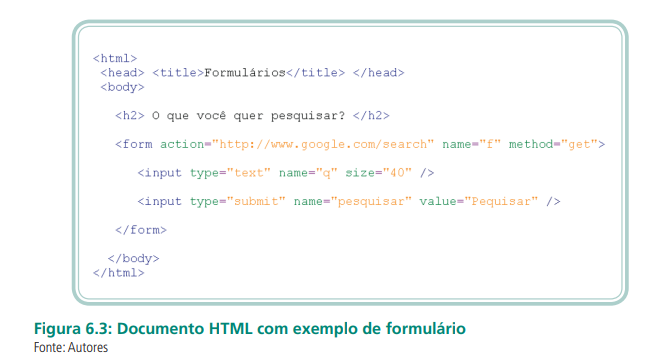
A tag responsável pela criação do formulário é a tag . Tal tag , tem três atributos considerados de destaque : action responsável por indicar para o formulário qual será a aplicação web onde os dados serão submetidos , name que serve para nomear o formulário e method que informa para o browser como os dados coletados pelo formulário serão enviados para a aplicação que foi definida no action .
O Gerenciamento de dados tornou-se uma das actividades mais importantes em muitas organizações. Conforme nos movemos para uma sociedade cada vez mais orientada para a informação, a determinação de organizar os dados para maximizar sua utilidade torna-se um problema muito importante.
TERMINOLOGIA BÁSICA
Nesta seção, vamos explicar vários conceitos básicos em gerenciamento de dados.
Um registro é uma coleção de itens de dados. Por exemplo, um registro de funcionário contém os dados relativamente os dados relevantes de um funcionário específico.
Um banco de dados é uma coleção de registros de tipos diferentes. Os registros em um banco de dados são interligados de forma que itens de dados relevantes em registros diferentes possam ser recuperados em dificuldade.por exemplo, podemos desejar interligar todos os registros de funcionários que trabalham para-o mesmo departamento de modo que seja fácil encontrar quem trabalha para um departamento específico.
PROJETO LÓGICO DE BANCO DE DADOS E PROJETO FÍSICO DE BANCO DE DADOS
o projeto de banco de dados pode ser dividido em duas etapas , projeto lógico e projeto físico
o projeto físico de banco de dados é o processo de selecionar uma estrutura física de dados para uma dada estrutura lógica de dados .
o projeto lógico de banco de dados é o processo de planejar a estrutura lógica de dados para o banco de dados .
Entretanto ao desenvolver torna responsável por código de infraestrutura que trabalho com Sockets, protocolos e exceptions .
O protocolo tratar corretamente as exceptions no caso de o servidor cair timeouts e outros detalhes são problemas de infraestrutura que leva bastante tempo para se resolver corretamente.
Tendo assim fácil mostrar o código ingenuo.A remotabilidade é uma dos aspectos que podem aparecer uma aplicação e desejase gastar o menor tempo gastar o menor tempo possivel.
O código do controlador é invocado internamente pela proxy .Pois encontrar diversos frameworks como o RMI e o Hibernate.
Contudo tendo várias práticas relacionadas ao desenvolvimento de software,incluindo Test Driven Development (TDD),Acceptance Test-Driven Development (ATDD) testes de integração ,feedback rápido ,integração contínua e entrega contínua.
Pois que o ATDD sugere criar testes de sistema antes da implementação para garantir um entendimento comum entre a equipe.
Visto que TDD,destaca-se a importância de escrever testes de unidade antes da implementação,garantindo que o código seja fácil de testar e por tanto ,provavelmente bem projetado .
Uma vez que o feedback rápido é crucial no desenvolvimento de software para identificar rapidamente falhas ou a necessidade de ajustes.
Web Design e HTML avançado (pgs 64 -100) – Resumo com mais conteúdo para compensar a semana que não foi publicado.
Além do HTML
Imagem
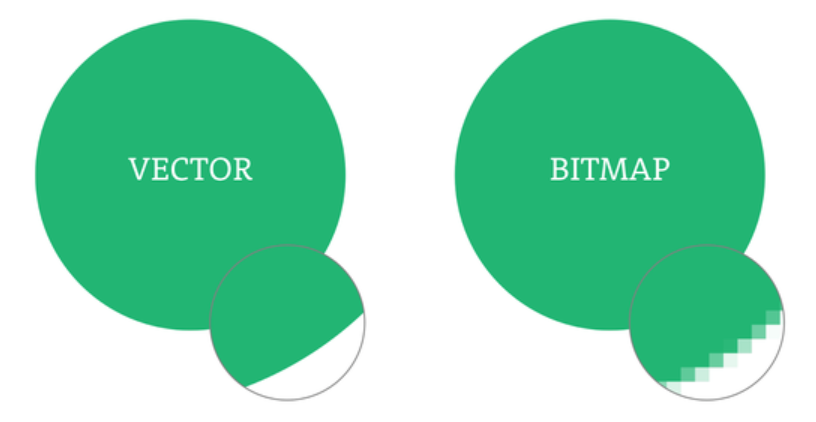
Em um cenário eletronicamente visto , as imagens se enquadram em duas categorias: imagens bitmap (raster) compostas de matrizes de pixels e imagens vetoriais definidas por equações. Enquanto as imagens bitmap perdem qualidade quando ampliadas, as imagens vetoriais mantêm sua nitidez. Programas como Corel Draw e Illustrator podem lidar com imagens vetoriais. Adobe Photoshop é líder em processamento de imagens raster. Pacotes de software Web como Adobe ImageReady e Macromedia Fireworks combinam os dois modelos.
Exemplo:
Bitmaps não compactados são raros na web, onde GIF e JPEG são os formatos dominantes. JPEG geralmente oferece compactação mais alta, mas para imagens pequenas, GIF tem tendencia em aparecer com tamanhos menores.
Cor
A profundidade de cor e a profundidade de bits afetam a dimensão da imagem. Pixeis diferentes podem produzir outras cores. A capacidade de exibição em cores é variável, são utilizadas 256 cores. Imagens de 2 bits (cor verdadeira) mostram 16,777 milhões de cores, exibindo cores verdadeiras e uma área maior. Na web, GIF e JPEG compactam bem o tamanho da imagem, independentemente do número de cores.
Paleta de Cores
Quando um tipo de imagem de 2 bits é exibida em um ambiente gráfico de 8 bits, ocorre uma conversão para torná-la visível. O sistema de 256 cores representa as cores usadas para criar uma paleta de cores. Nós podemos escolher este tipo de tecido para otimizar seu look considerando os tons dominantes do seu estilo. Roubar todas as cores de uma imagem afeta a exibição correta do sistema operacional, reduzindo a quantidade de cores disponíveis para os aplicativos. O navegador possui uma paleta própria, chamada Color Cube, que contém 216 tipo de cores, sendo as 0 restantes reservadas para a utilização do sistema. As cores internas e externas do cubo são ajustadas quando a imagem é carregada no navegador. Isso permite que o navegador ajuste e reduza automaticamente as cores para caber em sua paleta.
Anti-Aliasing
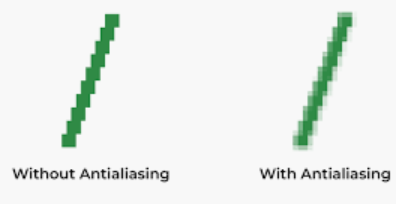
O anti-aliasing é muito importante para otimizar áreas dinâmicas de uma imagem adicionando cores comuns. A qualidade é melhorada, mas a eficiência da compressão é reduzida, isso faz com que é aumentado o número de cores e a dimensão da paleta. A qualidade da imagem é ruim e as curvas e linhas diagonais não são suavizadas. Com a utilização do anti-aliasing, é importante manter o número de cores necessário ao mínimo.
GIF
O formato de comunicação gráfica, um formato GIF, fornece compactação eficiente para imagens não gráficas. GIF, que usa o algoritmo Lempel-Ziv-Welch, preserva a qualidade visual enquanto compacta e substitui uma matriz horizontal de pixels da mesma cor e tamanho. GIF suporta entrelaçamento, transparência e animação. GIFs vinculados criam efeitos visuais, mas a exibição das imagens vinculadas pode ser atrasada. Os GIFs também podem substituir a cor pela luz, criando imagens transparentes que mantêm a forma do objeto.
JPEG(e JPG)
JPEG (Joint Photographers Expert Group) é bom para compactar imagens estáticas. Fornece compactação de alta perda de 10:1 a 100:1. Ao contrário do GIF, ele suporta o formato RGB e deixa informações de cores de 2 bits. JPEG progressivo e JPEG entrelaçado são recursos opcionais. A compactação JPEG sempre apresenta perdas e o tamanho final depende da qualidade desejada. JPEG não oferece suporte à cor especificada e reduzir a cor não reduz o tamanho.
PNG
PNG (Portable Network Graphics) é um formato criado pelo W3C para a web. Possui vantagens sobre GIFs, incluindo disparo contínuo, suporte para imagens de 2 bits, melhores efeitos progressivos, multirresolução e canal alfa de 8 bits. PNG pode ser considerado uma alternativa ao GIF, principalmente por sua forte transparência e suporte transparente. Alguns programas oferecem suporte a PNG, mas nem todos os navegadores oferecem suporte a todos os recursos.
Layout com Tabelas
Neste tópico é abordado o uso de tabelas HTML para layout de página. Embora as planilhas venham em diferentes tipos, elas são funcionais, por isso é importante saber como classificar, combinar células e manipular o espaço. Serão discutidas estratégias como o uso de imagens de 1 pixel para simular controles bidimensionais em HTML.
Frames
A seção somente quadro discute a divisão da visualização do navegador em subjanelas. Apresentamos este conceito básico de <frame>, que define a estrutura de linhas e colunas para a criação de layouts mais complexos. Discutimos como definir as propriedades de linha e coluna para determinar o tamanho do quadro. Também revisaremos estratégias para gerenciar metas de afiliados e maximizar o efeito TARGET. Isso permite que você abra links em guias separadas, o que proporciona uma melhor experiência de navegação.
Multimídia
Imagens Mapeadas
A parte baseada nas imagens mapeadas é classificada em dois tipos principais: lado servidor e lado cliente. Descreve como usar MAP e para identificar os pontos fortes da imagem. Apresentamos exemplos reais e mostramos como regiões específicas podem ser conectadas a outras áreas para melhorar a comunicação e personalizar a navegação.
Audio, Video e Plugins
Enfatiza o uso de elementos EMBED e OBJECT para áudio, vídeo e outros plug-ins no contexto de fusão de mídia. Funções relacionadas, como CONTROLS e AUTOPLAY, são introduzidas para controlar a reprodução e exibição desses itens.
Flash
Estamos particularmente interessados na tecnologia Flash desenvolvida pela Macromedia. Descreve como usar elementos EMBED para incluir animação, interatividade e integração de áudio e vídeo. Discutiremos os benefícios dos arquivos Flash, incluindo seu tamanho compacto e escalabilidade, bem como considerações para quando você precisar de um computador dedicado para criação e visualização.
Applets Java
O que é?
Os chamados applets Java desempenham um papel muito importante na web, fornecendo soluções para visualização de informações independentemente da origem do utilizador. Ao contrário dos itens que dependem de plug-ins ou tecnologias específicas, assim como o Flash, os applets são pequenos programas específicos de backend escritos em Java. A funcionalidade iniciada pelo navegador fornece uma experiência consistente em todas as plataformas.
Para realizar a executar código Java ocorre em uma “Java Virtual Machine” (JVM) é uma espécie emulação do sistema Java nos navegadores que suportam Java. Isso permite que programas inteligentes forneçam interfaces de comunicação interativas de áudio, vídeo, 3D e vídeo, isso independente do sistema operativo utilizado.
Quando eu posso usar?
Os applets do Java são ótimos para superar as limitações de HTML, protocolos HTTP e browsers. Isso permite o desenvolvimento de applets além dos recursos de linguagens integradas, como HTML e JavaScript. Estas aplicações podem incluir novos protocolos de comunicação, segurança e formatos multimédia. No entanto, esta liberdade de entrada maliciosa é prejudicial para uma página HTML. Um applet gráfico requer uma página HTML para executar e exibir a mesma imagem que uma imagem. O elemento HTML APPLET é usado em applets que suportam propriedades como CODE, HEIGHT, WIDTH, NAME, CODEBASE, ARCHIVE, etc. A capacidade de integração com JavaScript torna tudo ainda mais fácil.
Como posso incluir um applet numa página?
Os applets são incorporados nas páginas em HTML usando o elemento “APPLET”. Ao contrário do IMG, este elemento é um bloco que tem que ter o descritor de fechamento </APPLET> assim como muitas tags do próprio HTML. Contém os parâmetros exigidos pelo APPLET. Propriedades como por exemplo CODEBASE e ARCHIVE são opcionais e permitem que o applet seja localizado em diferentes servidores e que o módulo de software seja importado. O atributo MAYSCRIPT é necessário para permitir que o miniaplicativo acesse o código JavaScript da página. Os aplicativos Java fornecem uma variedade de funções e parâmetros configuráveis por meio do elemento <PARAM> facilitando ao ser inserido em páginas HTML. Alguns exemplos práticos incluem banners de texto roláveis, ícones inteligentes e interfaces de banco de dados, que podem ser encontrados em sites como Gamelan e o site Java da Sun.
Folhas de Estilo (CSS)
O que são folhas de estilo?
Uma folha de estilo (conhecido mais com o nome popular CSS) é um conjunto de regras ou normas que informa ao programa quem é responsável pela formatação do estilo de um determinado documento, por exemplo o HTML. Essas regras explicam como organizar, posicionar e estilizar o texto em sua página. As folhas de estilo são essenciais em muitos programas modernos de auto edição e processadores de texto. Este processo envolve atribuir um rótulo (nome do caractere) a um parágrafo e modificar suas propriedades. Todos os módulos marcados com este tipo terão as propriedades definidas. Este conceito se aplica não apenas aos editores do Word, mas também à web. Blocos marcados com tags HTML como H1, P, etc.
Exemplo:
A extensão das folhas de estilo normalmente são sempre “.css”
<LINK REL=”stylesheet” HREF=”estilo.css”>
Para que servem?
As folhas de estilo servem para:
-Separar melhor a parte da apresentação da estrutura;
-Controle absoluto da aparencia da página;
-Fazer com que as páginas HTML fiquem mais leves (economia de código em .html);
-Realização da manutenção de um site.
A linguagem CSS funciona agrupando elementos HTML chamados “objetos” e usando regras para definir propriedades de estilo. A simplicidade do CSS preserva a estrutura do HTML e dá aos designers muito controle sobre a aparência das telas do usuário final.
Regras Básicas
Regras declarações e seletores:
A estrutura da folha de estilos é rigorosamente composta por regras. Cada regra possui um ou mais blocos de informações que podem ser atribuídos a um ou mais seletores. Um seletor é um elemento de imagem que pode ser um descritor HTML, uma lista de descritores ou o atributo definidor de um grupo de descritores.
Exemplo:
seletores{
declarações
}
Múltiplas Declarações e Seletores
Comentários
Os comentários na folha de estilo tem a mesma sintaxe de muitas linguagens de programação:
/*Comentário no CSS*/
Valores e Unidades
Podemos usar %, px ou pt por exemplo, são os valores mais utilizados numa folha de estilos:
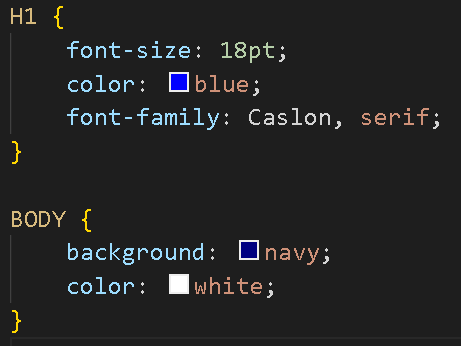
Cores
Podemos usar com códigos hexadecimais, RGB ou por escrita:
Estilo de Texto:
Pode ser modificado no texto seu tamanho, fonte, etc:
O autor continua falando sobre prototipos de alta e baixa fidelidade dando exemplos , como por exemplo no cenario de elaborar um site para um cliente. A primeira coisa a fazer é aprovar o projeto de como será́ este site e os protótipos começam a se mostrar excelentes ferramentas aqui, explicando que na hora de aprovar é melhor utilizar protótipo de baixa fidelidade, e não um layout (que é um protótipo
de alta fidelidade) e nunca mostre uma solução funcional de cara.
Depois o autor fala sobre as diversas ferramentas que podem ser usadas na construcao destes protótipos. Desde o lápis e papel até ferramentas mais arrojadas como o Axure (que gera wireframes funcionais e navegáveis), resaltando que o mais importante é escolher a ferramenta mais adequada para você e sua equipe.
O autor continua falando sobre wireframes, mas ja foi abordado nos resumos anteriors e dele da exemplos do processo dele que comeca sempre com lapis e papel e vai evoluindo dependo da tarefa e do projecto em si.
Validação de layouts
Essa etapa vai sempre depender das anteriores , onde cada nova etapa valida a anterior, e a etapa anterior for bem feita – a etapa seguinte será́ sempre mais tranquila. O autor destaca que precisamos estabelecer as metas deste procedimento.desde O quê vamos validar? Quais serão os nossos parâmetros? O quê esperamos em termos de rendimento e performance? E tmb tem que ser definido qual aspecto do layout está sendo validado.
O autor resalta que os metodos seguintes de validação dos layouts é aconcelhavel ser por meio de análise heurística, priorizando a objetividade e evitando influências pessoais e caso as metas envolvam compreensão do usuário, tempo de realização e processamento de informações, procedimentos empíricos, como testes com usuários, são aconselhaveis. E para estes testes o autor fala que é necessário criar fluxos representativos do sistema, realizar testes locais ou remotos e analisar os resultados , ondea amostra de usuários deve ser de qualidade, focado na compreensão do comportamento do usuário durante o teste.
A aoutor depois realca que embora o Jakob Nielsen fale que não é necessário testar com mais do que cinco usuários, para ele duas ou três pessoas que representem cada persona é mais do
que o suficiente para encontrar a maior parte das questões.
Monitoramento
Depois o autor aborda a etapa de monitoramento, ou seja acompanhar de perto, ver o que está acontecendo, e em caso de um produto interativo, podemos fazer isso de diferentes maneiras. Pense num app. por exemplo, podemos monitorar o uso do sistema se ele, por exemplo, fazer requisições ao servidor sempre que for acionado. Outra maneira, é acompanhar o que é discutido sobre o app. na
loja de aplicativos. Ler os reviews, entender os eventuais problemas reportados ali.
Podendo assim descobrir muita coisa importante que podeos ter deixado passar no desenvolvimento ou ainda identificar diferentes maneiras que as pessoas usam nossos serviços e sistemas interativos. Coisas para as quais nem imaginamos usar aquilo que fizemos. Entender estes
usos e as particularidades dos usuários, seus problemas e como eles os resolvem é crucial para propormos melhorias no futuro.
E por fim o autor ressalta a importância de ferramentas como Google Analytics e CrazyEgg de form a coletar feedback e tambem fóruns e até sessões de grupo focal.
Neste tópico, falamos um pouco do uso de Gerenciamento Espacial de Dados em termos das possíveis aplicações no dia a dia de quem o utiliza. Em termos de aplicações Militares e Aeronáutica Civil é possível fazer o rastreamento dos seus assets/recursos que nessa caso podiam ser navios militares ou aviões de uma companhia de Transporte de Carga onde o rastreio é feito baseado em mapas e um zoom sobre o determinado assets no mapa podendo fazer zoom e visualizar a posição geográfica do mesmo, o que capacita as entidades responsáveis durante a tomada de decisões importantes com o auxilio da informação fornecido previamente, sendo toda essa informação fornecida pelo ARCGIS , onde ele é o responsável pelo manuseio e analise de informações geográficas e a capacidade de ver estatísticas geográficas por meio de construção de mapas com recurso a dados GIS, onde tudo isso é feito através da interpretação desses dados GIS ,exploração e modelagem , desde da aquisição ate a compreensão dos resultados.
Com Auxilio de poder computacional por meio de um software de analise espacial onde é feita a recuperação da informação, onde sua variação depende do numero de Tarefas e sua complexidade. A analise dessas áreas permite ao usuário saber se uma determinada região/área é adequada para realizar a operação pretendida e que impactos isso poderia ter na finalidade de uso, analisando também possíveis riscos afim de evitar possíveis perdas, com auxilio de tais ferramentas ao nosso dispor é possível saber qual será o melhor caminho a se seguir , onde podemos ver isso nos dias de hoje em aplicativos com Google mapa , Waze , Uber entre vários outros onde e possível ver o asset no mapa e realizar alguma operação, podendo ser visualizar e chamar um Uber de acordo com a sua proximidade de sua posição geográfica permitindo assim os condutores aloquem as suas viaturas em áreas que lhes permitem fazer o seu serviço de forma eficiente e os usuário terem a capacidade de saber que veiculo esta mas próximo e que preço ou tarifa será associado ao mesmo.
No exemplo abaixo mostramos com era feito controlo e a gestão de asset de um navio militar pelo seu capitão através do uso do Sistema da Xerox chamada Information visualizer que possui um conjunto de ferramentas que possibilitavam por meio de explorações animadas em 3D de edifícios , veículos ,diretórios e diagramas organizacionais
Sistema da Xerox
Os sistemas de gestão de dados espaciais são muito importantes para o nosso dia a dia e para a vida de quem os utiliza. A escolha de ícones, representações gráficas e layouts de dados que atraiam os usuários de maneira natural e fácil é fundamental para o sucesso desses sistemas. Os designers são responsáveis por criar interfaces intuitivas e atrativas que permitem aos usuários explorar as informações de maneira fácil e eficaz. A satisfação de pairar sobre um objeto e explorá-lo ampliando e diminuindo o zoom atrai até os usuários mais ansiosos, que desejam recursos e informações adicionais.
En este capítulo del libro nos relata que diseñar una interfaz implica un proceso muy difícil con el equipo de diseño de UI, usuarios y cliente. Este proceso es un ciclo en el que se tiene que investigar, buscar ideas, hacer pruebas y construirlo.
Aunque el diseñador gráfico es un puesto esencial, no hay que olvidar que es una parte de un equipo multidisciplinario, la comunicación empieza con las ideas y no al acabar el proyecto. El diseñador gráfico es un trabajo que va más allá de crear gráficos, el diseñador se encarga de la comunicación visual eficaz mediante imágenes y texto.
FLUJO
En el proceso del diseño, lo que puede aportar el diseñador gráfico recoge un gran alcance antes de volverse una tarea específica. Diseñar implica realizar un “flujo” durante todo el proceso interactivo, creando una experiencia agradable y estética para el usuario final. La interacción se explica como un bucle en el que se ven implicados causa-efecto-retroalimentación, en el cual el usuario experimenta ese flujo. La interfaz actúa como el control visible de ese flujo, y la usabilidad es el resultado de un flujo diseñado teniendo en cuenta al usuario
PROJECTOS 2.1 PRINCIPAIS 2.1.1 BOONZI MOBILE 2.1.1.1 INTRODUÇÃO
Na era digital em constante evolução, as aplicações para smartphones se tornaram populares, especialmente no ramo das finanças pessoais, onde aplicativos concorrentes funcionam como rastreadores de despesas simples em forma de gráficos.
Apesar da maturidade do Boonzi Desktop no gerenciamento financeiro, a empresa reconhece a necessidade de inovar e acompanhar a crescente demanda por soluções móveis. Assim, surge o Boonzi Mobile, uma extensão do Boonzi para smartphones.
Esse novo aplicativo tem como objetivo oferecer a mesma eficiência do Boonzi Desktop no controle financeiro, adaptado para a experiência móvel, permitindo aos usuários gerir suas finanças de forma simples e eficaz em qualquer lugar.
2.1.1.2-Objetivos Principais do Boonzi Mobile:
Integração e Sincronização:
Conexão com o Boonzi Desktop.
Sincronização entre múltiplos dispositivos.
Capacidade de registrar transferências entre contas e editar transações.
Adaptação Multilíngue e Multimoedas:
Disponibilidade em Português ou Inglês.
Suporte a várias moedas.
Objetivos de Comunicação e Posicionamento da Marca:
Expansão para o mercado de aplicativos móveis.
Aumento do valor da marca com um produto mais abrangente.
Atrair novos clientes para a comunidade Boonzi.
A ênfase foi em garantir que o Boonzi Mobile oferecesse uma experiência familiar aos usuários do Boonzi Desktop. Elementos como navegação, ícones e conteúdos foram adaptados para a visualização em dispositivos móveis.
Em essência, o foco principal foi tornar o Boonzi acessível em qualquer lugar, simplificando o registro de despesas e enfatizando o controle financeiro preciso e a maximização das economias pessoais.
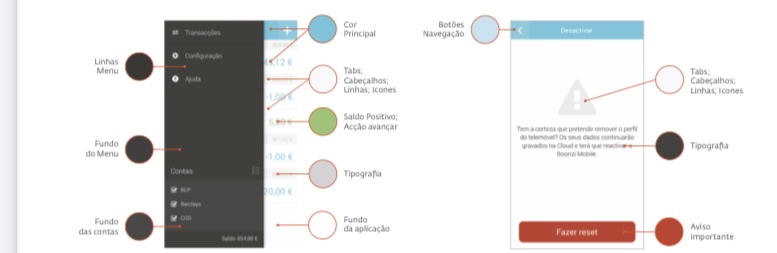
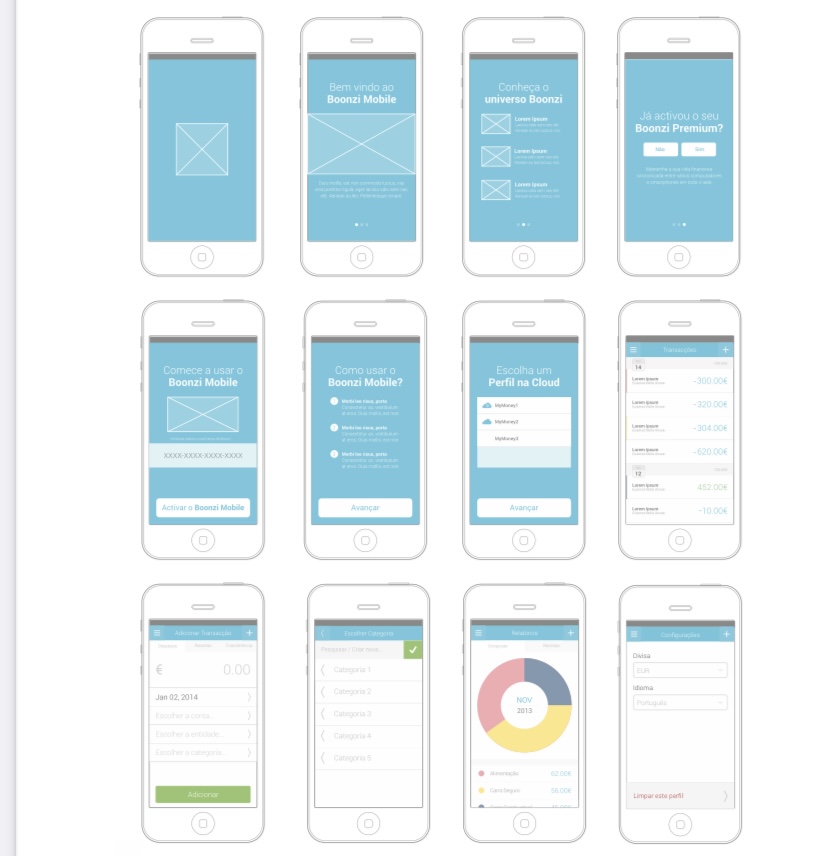
2.1.1.3 PRÉ-DESENVOLVIMENTO No pré-desenvolvimento, a discussão de ideias e esboços é crucial para desconstruir conceitos existentes e explorar novas ideias. A evolução dos esboços, discussões com a equipe e pesquisa de tendências financeiras são partes essenciais desse processo. O moodboard resulta da pesquisa, consolidando imagens, cores e formas para definir as interfaces gráficas da aplicação.
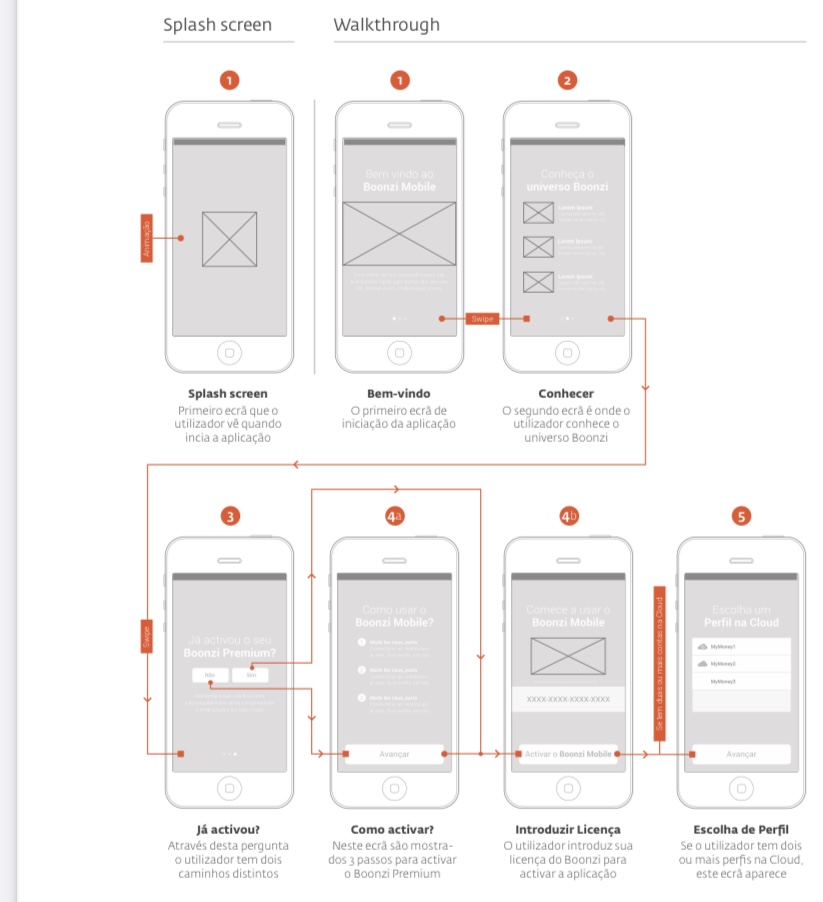
2.1.1.4 DESENVOLVIMENTO — PROCESSO DE DESIGN Durante o desenvolvimento, os wireframes, guias visuais sem uso de cor, desempenham um papel fundamental na estrutura de um produto digital. Constantes discussões com a equipe e o gestor de produto moldaram o layout. Exemplos de alterações incluem a evolução do menu das contas para seguir a coerência gráfica do Boonzi Desktop e a relocalização do saldo total na tela de transações, eliminado após considerações com os programadores sobre a viabilidade de um menu lateral semelhante ao Boonzi Desktop.